资源介绍
[中字] 工业机器人编程实战精要(中文字幕英文视频教程)
本课程聚焦工业机器人仿真编程的核心应用与实操技能,以主流机器人仿真软件为工具载体,通过搬运、拆垛、涂胶三大典型工业场景的全流程实操演示,帮助学习者快速掌握从布局搭建、参数配置到程序编写、仿真优化的完整技能体系。课程内容兼顾理论指导性与实践落地性,所有操作均基于真实工业场景逻辑设计,适合机器人技术初学者、设备运维人员及生产技术升级相关从业者系统提升实操能力。
三、课程内容框架与核心模块
本课程共包含 3 大应用模块,合计 18 个核心视频教学资源,每个模块均按照 “场景搭建 - 参数配置 - 程序开发 - 仿真优化 - 成果输出” 的工业逻辑循序渐进展开,配套对应的字幕文件与场景模型文件,确保学习过程可跟随、可复现。
(一)模块一:搬运应用仿真编程(含 6 个视频)
作为工业机器人最基础也最广泛的应用场景,本模块从零开始构建搬运仿真系统,覆盖从布局到输出的全流程关键技术。
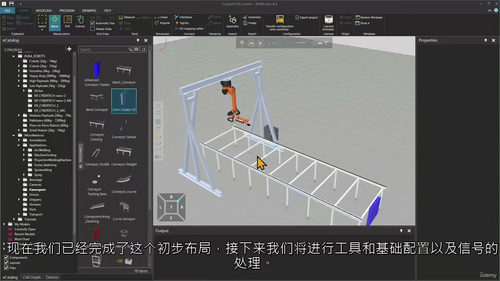
场景基础搭建:通过视频演示基于 2D 图纸(配套 1-2D-Drawing.dxf 文件)构建搬运场景布局的完整流程,详细讲解仿真环境中设备选型、工位排布、坐标系建立的核心原则,帮助学习者掌握符合工业生产逻辑的场景搭建方法。
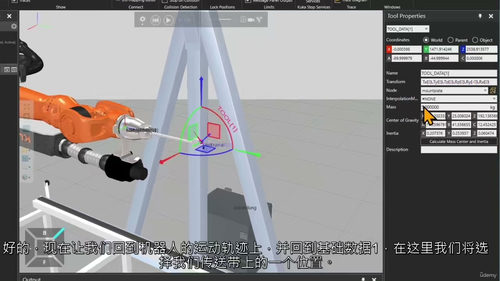
工具中心点(TCP)配置:采用三点法完成工具中心点的精准标定,视频中通过实操演示讲解标定原理、操作步骤及误差修正技巧,解决机器人作业中 “工具定位不准” 的核心痛点,为后续精准作业奠定基础。
拾取与放置程序开发:聚焦搬运作业的核心动作逻辑,演示从工件识别、路径规划到拾取放置的程序编写过程,重点解析程序中坐标调用、动作指令、逻辑判断等关键代码的设计思路,确保程序具备实用性与稳定性。
路径可视化与可达性校验:通过仿真软件的路径可视化功能,直观展示机器人运动轨迹,同时详细讲解可达性检查的操作方法与判断标准,帮助学习者提前识别轨迹中的 “不可达点”,避免实际作业中的设备碰撞风险。
碰撞检测与仿真运行:重点演示碰撞检测功能的参数设置与运行逻辑,通过模拟真实作业流程进行动态碰撞监测,讲解碰撞预警后的轨迹调整方法,同时展示完整仿真运行的操作步骤与状态监控技巧。
工厂布局导出:讲解仿真场景布局的标准化导出方法,包括文件格式选择、参数配置、数据关联等关键环节,确保导出的布局文件可用于后续生产规划、设备采购或跨平台协作。
(二)模块二:拆垛应用仿真编程(含 6 个视频)
针对物流与仓储环节的高频作业场景,本模块聚焦拆垛作业的高效性与稳定性,融入循环程序、物理仿真等进阶技术。
拆垛场景搭建:演示符合物流作业规范的拆垛场景布局搭建,包括托盘、工件、机器人、输送线等设备的建模与排布,讲解不同规格工件与托盘的适配性设计要点,还原真实仓储拆垛现场逻辑。
TCP 两点法配置:相较于基础的三点法,本视频讲解更适用于对称工具的两点法标定技术,通过对比演示两种方法的适用场景差异,帮助学习者根据实际工具类型灵活选择标定方案,提升参数配置效率。
循环程序开发:针对拆垛作业中 “重复拾取 - 放置” 的动作特点,详细演示循环程序的编写逻辑,包括循环次数设定、条件判断语句、异常处理机制等,解决批量拆垛作业的程序高效开发问题。
物理功能应用:引入仿真软件的物理引擎功能,演示重力、摩擦力、碰撞力等物理参数的配置方法,通过模拟工件堆叠、拾取过程中的物理反馈,提升仿真结果的真实性,为实际作业参数调试提供参考。
循环时间分析:聚焦生产效率优化需求,讲解循环时间的统计与分析方法,通过视频演示如何通过仿真软件获取作业循环周期、动作耗时分布等数据,进而识别效率瓶颈点,为流程优化提供数据支撑。
混合现实仿真可视化:展示将拆垛仿真场景导入混合现实环境的操作流程,讲解虚拟场景与现实空间的融合技巧,帮助学习者通过沉浸式视角检验仿真效果,提升场景设计的合理性与直观性。
(三)模块三:涂胶应用仿真编程(含 6 个视频)
针对精密制造领域的高精度作业需求,本模块重点攻克路径规划、精度优化等核心技术,融入龙门架等特殊设备的应用逻辑。
涂胶场景搭建:基于龙门架模型(配套 1-gantry.step 文件)构建精密涂胶场景,讲解涂胶机器人、待加工工件、涂胶工具等设备的选型与布局原则,重点强调高精度作业对场景坐标系校准的特殊要求。
TCP 一点法配置:针对涂胶工具的结构特点,演示一点法标定技术的操作流程,讲解该方法在高精度作业中的优势与误差控制技巧,确保涂胶工具的定位精度满足工艺要求。
路径编程与自动生成:结合涂胶作业的复杂轨迹需求,讲解手动路径编程与自动路径生成两种方式的操作方法,重点演示基于工件模型轮廓自动生成涂胶路径的技巧,解决复杂轨迹编程效率低的问题。
路径追踪分析:利用仿真软件的轨迹追踪功能,对涂胶路径进行动态分析,演示如何查看路径上各点的坐标、速度、加速度等参数,帮助学习者识别轨迹中的平顺性问题,为精度优化提供依据。
机器人路径优化:聚焦涂胶精度与作业效率的双重需求,讲解路径优化的核心策略,包括轨迹平滑处理、关节运动优化、避障路径调整等,通过对比优化前后的仿真效果,直观展示优化带来的精度提升与效率改善。
真实感视频制作:演示将优化后的涂胶仿真过程制作成真实感视频的方法,包括渲染参数设置、镜头角度调整、时间轴编辑等技巧,可用于作业流程展示、员工培训或技术方案汇报。
四、课程特色与学习价值
场景覆盖全面:选取搬运、拆垛、涂胶三大跨行业典型应用场景,基本涵盖了工业机器人从基础到进阶的核心作业类型,学习者可根据自身行业需求重点突破,同时具备跨场景迁移能力。
实操导向明确:18 个视频均以 “操作演示 + 细节讲解” 的形式呈现,每个关键步骤都配有清晰的操作画面与逻辑说明,配套的字幕文件可辅助精准捕捉操作要点,降低学习门槛。
资源配套完善:除核心视频外,课程提供场景搭建所需的 DXF 图纸、STEP 模型等基础文件,确保学习者可完全复现课程中的仿真场景,实现 “跟着学、跟着做” 的沉浸式学习效果。
技能体系完整:每个模块均构建了 “搭建 - 配置 - 编程 - 优化 - 输出” 的闭环技能链,不仅讲解单一操作技巧,更注重培养学习者的系统思维,助力其独立完成工业场景的仿真编程项目。
五、适用人群
本课程适合工业机器人技术入门学习者、智能制造领域技术人员、生产设备运维人员、职业院校相关专业学生及企业内部技术培训使用。无论是否具备机器人操作基础,均可通过本课程的系统学习,快速掌握工业机器人仿真编程的核心技能,为实际生产作业或技术升级提供有力支撑。