资源介绍
pdf版电子书,有页码
本书通过 20 个课程单元系统讲解自动控制的基本原理,将理论知识与 MATLAB 实践相结合,适合作为自动控制入门教材。其核心特点是简洁易懂,融合了作者数十年的教学经验,既保留传统学习方法的优势,又注重培养批判性思维和问题解决能力,助力读者在人工智能时代掌握自动控制的核心技能。
全书以单输入单输出(SISO)线性连续系统为主要内容,同时包含多输入多输出(MIMO)系统和离散时间系统的入门知识,为进阶学习搭建桥梁。通过建立扎实的基础知识,帮助读者应对现代自动控制领域的复杂挑战,为学术研究和职业发展奠定基础。
核心内容板块
基础概念与数学模型
第 1 讲介绍控制系统的基本概念,包括系统、控制、反馈回路等核心要素,区分开环控制、前馈控制等不同控制方式。
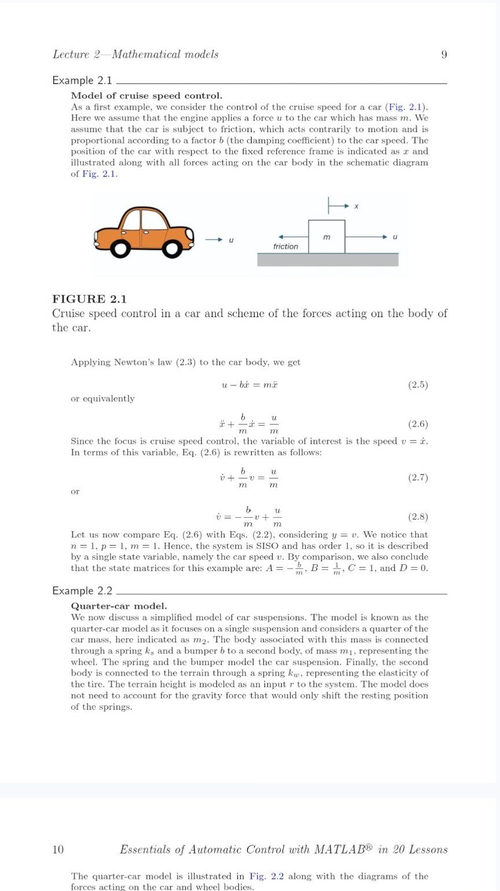
第 2 讲聚焦数学模型构建,通过牛顿定律、基尔霍夫定律等物理规律,推导机械系统、电气系统和机电系统的状态方程,如巡航速度控制模型、RC 电路、直流电机模型等。
第 3 讲为 MATLAB 基础入门,涵盖向量矩阵定义、基本运算、LTI 系统建模等实用操作,为后续仿真分析打下工具基础。
变换与系统分析
第 4-5 讲讲解拉普拉斯变换及其在连续时间线性系统中的应用,包括变换性质、 inverse 变换计算,以及系统的状态空间表示与时间演化分析。
第 6 讲探讨连续线性时不变系统的平衡点与稳定性,引入劳斯判据(Routh criterion)判断系统稳定性。
第 7-8 讲介绍传递函数、极点零点分析,以及系统聚合(串联、并联、反馈连接)的等效变换,结合 MATLAB 实现系统特性分析。
系统性能与控制设计
第 9 讲研究系统的能达性与可观性,通过能达性矩阵和可观性矩阵判断系统特性,介绍卡尔曼分解(Kalman decomposition)。
第 10-11 讲分析时域性能指标(如上升时间、调节时间、超调量)和频率响应(波特图),探讨一阶、二阶系统的动态特性及主导极点近似方法。
第 12 讲围绕闭环稳定性展开,介绍奈奎斯特判据(Nyquist criterion)及稳定性裕量(增益裕量、相位裕量)的计算。
离散系统与控制器设计
第 13-14 讲讲解离散时间系统的时域分析与 z 变换,探讨采样数据系统的建模与特性,区分有限脉冲响应(FIR)和无限脉冲响应(IIR)系统。
第 15-17 讲聚焦控制器设计,包括稳态性能(系统型别、稳态误差)、瞬态性能(相位超前 / 滞后补偿器)的设计方法,结合 MATLAB 实现 PID 控制器调优和状态调节器设计。
适用人群
主要读者:本科工科学生(如电气工程、自动化、机械工程等专业)。
扩展读者:对自动控制感兴趣的广大读者,包括相关领域的科研人员和工程技术人员。
由于自动控制是多个学科的基础课程,本书提供的分析工具和核心问题解析,能帮助不同背景的读者深入理解该学科。
作者背景
路易吉・福尔图纳:意大利卡塔尼亚大学系统理论全职教授,1977 年获电气工程学位(最优成绩),曾担任工程学院院长,研究领域包括鲁棒控制、托卡马克机器控制、非线性电路等,发表 14 部学术著作和 12 项工业专利。
马蒂亚・弗拉斯卡:卡塔尼亚大学研究员,2003 年获博士学位,研究方向为非线性系统、复杂网络、生物启发机器人,担任多个国际期刊编委,发表 250 余篇论文。
阿图罗・布斯卡里诺:卡塔尼亚大学技术助理,2008 年获博士学位,研究涉及非线性电路、等离子体工程等,与多个国际研究机构有合作。
特色与价值
理论与实践结合:每讲包含实例分析和 MATLAB 练习,帮助读者将理论转化为解决实际问题的能力,例如通过 MATLAB 的step bode nyquist等命令实现系统仿真与分析。
结构清晰:20 讲的框架循序渐进,从基础概念到高级应用,覆盖经典控制理论的核心内容,适合自主学习和课堂教学。
时代适应性:在人工智能快速发展的背景下,强调传统控制理论的基础作用,培养读者应对复杂系统的分析与设计能力,为学习最优控制、鲁棒控制等进阶内容铺路。
本书不仅是一本教材,更是一本实用的参考指南,助力读者在自动控制领域构建知识体系,提升实践技能。