
资源介绍
英文视频教程)
在现代汽车工程领域,车辆悬架系统的性能直接决定了行驶舒适性、操控稳定性与安全性,而控制系统的设计则是提升悬架性能的核心环节。本课程《Vehicle suspension control 3 - PID + LQR + Resonance analysis》聚焦车辆悬架系统的先进控制技术,以单输入单输出(SISO)系统、多输入多输出(MIMO)系统为研究对象,系统讲解 PID 控制、LQR 控制、共振分析及模型降阶等关键技术,通过从简单到复杂的模型演进(从 1 自由度到半车、整车模型),帮助学习者构建从理论建模到实际控制的完整知识体系。
一、课程定位与核心目标
本课程是车辆控制领域的进阶课程,适合具备基础控制理论(如传递函数、状态空间)和车辆动力学知识的学习者(包括研究生、汽车工程从业人员、控制工程研究者等)。课程以 “模型建模 — 控制设计 — 性能分析” 为主线,通过 7 大模块的递进式学习,最终实现三大核心目标:
掌握悬架系统的建模方法:从简化的 1/4 车模型到复杂的半车、整车模型,理解系统动力学方程的推导逻辑,掌握线性化处理技巧;
精通经典与现代控制算法:深入理解 PID 控制的参数整定原理、LQR 控制的成本函数设计与 Riccati 方程求解,能够根据系统特性选择合适的控制策略;
具备系统优化与分析能力:通过共振分析识别系统关键频率特性,利用主导极点近似等模型降阶方法简化复杂系统,提升控制算法的工程实用性。
二、课程模块详解
模块 1:SISO 系统的共振分析(Resonance analysis of SISO systems)
本模块以最简单的单输入单输出系统为起点,通过 1/4 车简化模型(仅考虑车身垂直运动),建立共振分析的基础框架。
核心内容:
1/4 车简化模型的搭建:从物理结构出发,简化悬架系统为 “质量 — 弹簧 — 阻尼” 二阶系统,明确车身质量、悬架刚度、阻尼系数等关键参数;
数学建模与方程求解:推导系统运动微分方程(ODE),引入阻尼比参数描述系统阻尼特性,通过解析法求解方程,得到系统在谐波激励下的响应;
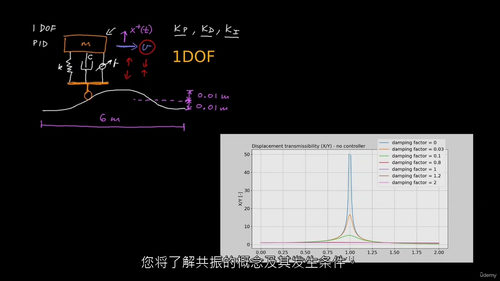
频率域特性分析:将谐波响应转化为幅频特性与相频特性,定义频率比(激励频率与固有频率之比),分析不同阻尼比下系统共振峰值的变化规律;
s 平面分析:将系统特征方程映射到 s 平面,通过极点位置直观判断系统稳定性与固有频率特性。
学习价值:掌握二阶系统的共振本质,理解阻尼比、固有频率对系统响应的影响,为后续复杂系统的共振分析奠定基础。
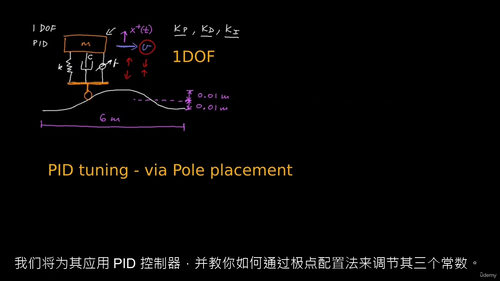
模块 2:基于闭环极点的 PID 整定(1 自由度模型)(PID tuning with closed loop poles)
在 SISO 系统基础上,本模块聚焦 PID 控制的设计与整定,以 1 自由度模型为例,建立闭环控制的理论框架。
核心内容:
PID 控制原理与直觉理解:分解比例(P)、积分(I)、微分(D)环节的作用 ——P 调节响应速度,I 消除稳态误差,D 抑制超调,通过直观案例说明各参数对系统性能的影响;
闭环控制系统建模:绘制 PID 控制的闭环框图,推导闭环传递函数,明确系统输入(路面激励)、输出(车身位移)与控制量(悬架力)的关系;
PID 参数与闭环极点的关联:通过特征方程将 PID 参数(Kp、Ki、Kd)与闭环极点位置绑定,提出 “通过指定极点位置反推 PID 参数” 的整定思路;
多输入多输出(MIMO)系统的 PID 应用:扩展 1 自由度模型至 MIMO 场景,推导闭环传递函数矩阵,讨论多变量系统中 PID 参数耦合问题,介绍基于理论极点配置的解耦思路;
AI 辅助整定:引入人工智能工具辅助 MIMO 系统的 PID 参数优化(如 6 个 PID 常数的协同整定),通过案例展示 AI 在复杂参数寻优中的效率。
学习价值:突破传统 “试凑法” 整定 PID 的局限,建立 “基于极点配置的系统化整定” 思维,理解 MIMO 系统中 PID 控制的难点与解决方案。
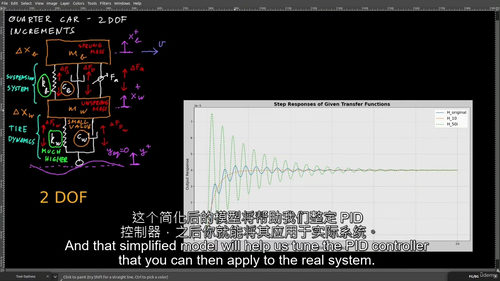
模块 3:主导极点近似与 PID 整定(2 自由度 1/4 车模型)(Dominant pole approximation + PID tuning)
当系统阶数升高(如 2 自由度 1/4 车模型,同时考虑车身与车轮的垂直运动),直接设计控制器会面临计算复杂、参数耦合等问题。本模块引入 “主导极点近似” 方法,实现复杂系统的降阶简化。
核心内容:
2 自由度 1/4 车模型建模:推导包含车身质量、车轮质量、悬架刚度、轮胎刚度的运动方程,建立系统状态空间矩阵,分析模型阶数升高带来的控制挑战(如状态变量增多、极点数量增加);
主导极点近似原理:解释 “主导极点” 概念 —— 系统响应主要由离虚轴最近的几个极点决定,其他极点(非主导极点)对响应影响较小,可忽略;
1/4 车模型的降阶实现:通过 4 步递进分析,识别 2 自由度模型中的主导极点(通常与车身运动相关),忽略车轮运动的快速响应极点,将高阶模型近似为低阶系统;
基于降阶模型的 PID 整定:利用简化后的低阶模型设计 PID 参数,再验证其在原高阶系统中的控制效果,平衡控制精度与计算复杂度。
学习价值:掌握 “抓主要矛盾” 的系统简化思想,为高阶复杂系统的控制设计提供实用方法。
模块 4:LQR 控制在 1/4 车模型中的应用(LQR control applied to a quarter car model)
作为现代最优控制的代表方法,LQR(线性二次调节器)在悬架控制中具有显著优势。本模块系统讲解 LQR 的理论基础与工程实现。
核心内容:
LQR 与极点配置的对比:分析两种方法的本质差异 —— 极点配置关注闭环稳定性与动态特性,LQR 则通过优化成本函数实现 “整体最优”;
成本函数与权重设计:定义 LQR 的核心指标(状态变量加权平方和 + 控制量加权平方和),讲解权重矩阵(Q、R)的物理意义:Q 矩阵元素越大,对应状态变量(如车身位移、速度)的抑制优先级越高;R 矩阵越大,控制能量(如悬架力)的消耗越受限制;
Riccati 方程推导与求解:从变分法出发,推导 LQR 最优控制律满足的 Riccati 方程,解释其在 “状态反馈增益矩阵” 求解中的核心作用;
1/4 车模型的 LQR 实现:通过代码解析,展示如何根据控制目标(如优先降低车身加速度)调整 Q、R 矩阵,对比 PID 与 LQR 的仿真结果(如车身位移波动、控制能耗),验证 LQR 的优化效果。
学习价值:理解最优控制的 “权衡” 思想,掌握通过权重矩阵量化控制目标的方法,提升复杂系统的控制设计能力。
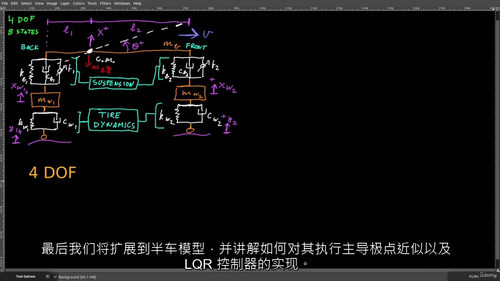
模块 5:期末考试:半车模型的建模、线性化与降阶(Final Exam - Half car model)
本模块通过 “半车模型” 综合考核前期知识点,强化从建模到控制的完整流程。
核心内容:
半车模型建模:考虑车身的垂直运动与俯仰运动,推导包含前后悬架、车身质量、转动惯量的动力学方程,比 1/4 车模型更贴近实际车辆运动特性;
模型线性化:针对半车模型中可能存在的非线性环节(如悬架限位、轮胎刚度非线性),采用泰勒展开进行线性化处理,得到适用于线性控制的状态空间模型;
主导极点近似应用:在高阶半车模型中识别主导极点(如车身俯仰运动对应的低频极点),忽略次要极点(如车轮高频振动),实现模型降阶,为后续控制设计简化计算。
学习价值:通过综合案例整合建模、线性化、降阶等核心技能,培养解决实际工程问题的综合能力。
模块 6:MIMO 系统的共振分析(Resonance analysis of MIMO systems)
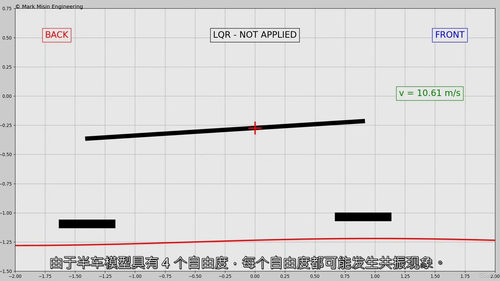
MIMO 系统(如半车、整车模型)的共振特性更为复杂,本模块扩展共振分析方法至多变量场景。
核心内容:
半车模型的无阻尼固有频率求解:通过特征值分析,计算系统在无阻尼状态下的固有频率(如车身垂直振动频率、俯仰振动频率),识别各频率对应的振动模态;
s 平面极点与共振特性的关联:将固有频率映射到 s 平面,通过极点实部(衰减率)与虚部(振荡频率)分析系统共振的强弱与衰减速度;
整车模型简介:初步介绍包含侧倾、横摆等运动的整车模型,说明其 MIMO 特性对共振分析的更高要求。
学习价值:掌握 MIMO 系统共振特性的分析方法,理解多模态振动的耦合机制,为整车悬架的共振抑制提供理论支持。
模块 7:课程总结与工具支持(Last Words)
本模块提供课程总结与实践工具,帮助学习者完成从理论到实践的过渡。
核心内容:
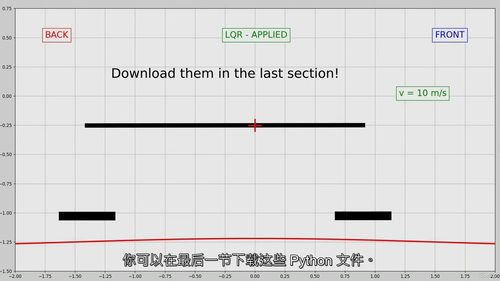
Python 工具包安装与使用:提供 Windows 系统下的 Python 环境配置指南,配套代码文件(如 LQR_2DOF_sim.py、PID_1DOF_sim.py)可直接运行,方便学习者复现课程案例、验证自己的控制算法;
关键知识点回顾:梳理共振分析、PID 整定、LQR 设计、模型降阶等核心内容的逻辑关联,构建完整知识网络。
学习价值:解决实践环节的技术障碍,鼓励学习者通过编程实现理论验证,培养 “理论设计 — 仿真验证 — 迭代优化” 的工程思维。
三、课程特色与学习收获
渐进式模型设计:从 1 自由度到半车、整车模型,难度阶梯式上升,符合认知规律,帮助学习者逐步掌握复杂系统的分析方法;
理论与实践结合:每个知识点均配套数学推导与 Python 代码,学习者可通过仿真直观感受控制参数对系统性能的影响;
方法通用性强:讲解的 PID 整定、LQR 设计、模型降阶等方法不仅适用于车辆悬架,还可迁移至机器人、航空航天等其他控制领域;
工程导向明确:强调控制算法的实用性(如通过降阶减少计算量),平衡理论最优与工程可实现性。
通过本课程的学习,学习者将具备从系统建模到控制算法设计、性能优化的完整能力,能够独立解决车辆悬架控制中的实际问题,为从事汽车底盘控制、智能驾驶等领域的研究与开发奠定坚实基础。无论是希望深入理解控制理论的研究者,还是致力于提升悬架性能的工程师,都能从课程中获得针对性的知识与技能提升。