资源介绍
视频数量:14个
总时长:25分
课程介绍:
树莓派机器人制作
想象一下,你按一下键盘上的方向键,远处的迷你小车就开始灵活地前进、后退、左转、右转——这听起来是不是很酷?今天要介绍的这门课,就是手把手教你从零开始打造这样一辆无线遥控的树莓派智能小车。
课程来自创客学院,由Venkatesh Varadachari老师主讲。别看总时长只有25分钟,内容安排得相当紧凑实用。整个课程围绕一个核心目标:用树莓派配合L239D电机驱动芯片,制作一辆能够用键盘无线控制的小车。
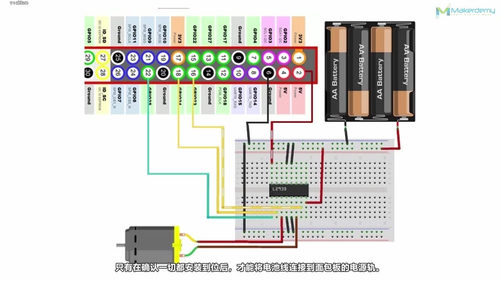
课程一上来先讲硬件基础。你会了解到构建这辆小车需要准备哪些材料:树莓派本体(支持Model B、B+或2代)、L239D电机驱动芯片或现成的驱动模块、5V 1A的移动电源作为供电、两枚100转每分钟的直流减速电机提供动力、配套的轮子和万向轮、若干跳线用来连接电路,以及一个无线键盘用于远程控制。选材这部分看似简单,但选对了零件能让后面的组装顺利很多,老师会告诉你哪些配件是必须的、哪些可以替换。
接下来是理解L239D这个芯片的工作原理。这是整个项目的技术核心,因为电机需要正反转来改变运动方向,而L239D恰恰能通过控制电流方向实现这一点。课程会详细介绍芯片的引脚分布、各引脚的功能、以及所谓的逻辑表——通过输入不同的电平组合,控制两个电机的正转、反转和停止。不理解这个,你写的代码就是无本之木;搞清楚了这里面的门道,后面编程控制电机就是顺水推舟的事。
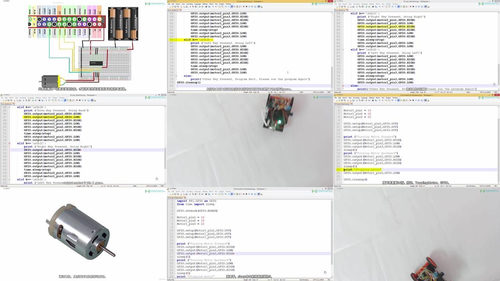
理论铺垫完毕,就进入实战环节了。项目一教的是如何让一个BO电机转起来。组装电路是第一步,要把树莓派的GPIO引脚、L239D芯片和电机正确连接,课程提供了详细的电路图,包括使用成品驱动模块和直接用芯片两种方案。电路搭好后,开始写程序控制。课程会带着你一步步操作:先在代码里定义要使用的引脚编号,然后配置这些引脚的工作模式,最后编写控制电机正转和反转的具体逻辑。每一步都有代码演示和讲解,理解起来不费劲。
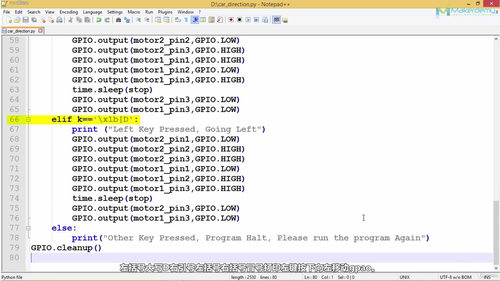
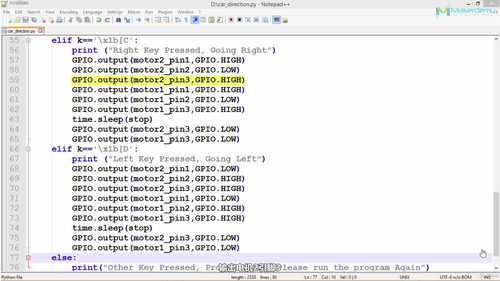
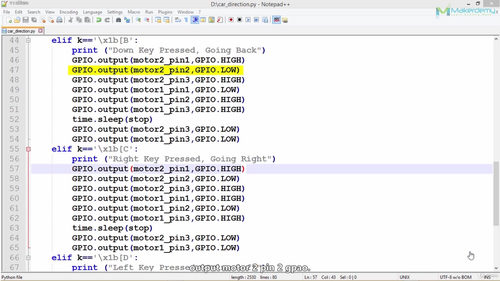
项目一练手之后,项目二才是重头戏——把单车电机升级成两轮驱动的小车,还要加上无线控制功能。这部分的代码量明显增加了,但思路很清晰:先定义左右两个电机的控制引脚,然后编写用户自定义函数,把方向键和电机的运动对应起来。按下键盘上的前键,两个电机同时正转,小车前进;按下后键,两个电机同时反转,小车后退;左键让一侧电机正转另一侧反转,小车原地左转;右键则相反。课程还教你如何把程序部署到树莓派上远程运行,甚至给源代码加上了LED闪烁功能,让小车在移动时能有视觉反馈。
整门课学下来,你不仅能带走一辆能跑的小车,更重要的是掌握了一套完整的技术链条:从硬件选型、电路连接到树莓派GPIO编程,再到用Python读取键盘输入、控制电机驱动IC,最终实现人机交互。这种从概念到原型的完整经历,对任何想入门硬件开发或机器人领域的人来说都非常宝贵。
这门课特别适合有几周编程基础的爱好者用来拓展技能,也适合树莓派玩家想动手做点不一样的东西,甚至DIY机器人的初学者也能从中受益。不需要你有多少电子电路知识,跟着课程节奏走就能搞定。25分钟的课程,把最核心的东西都讲到了,剩下的就是自己动手实践。