资源介绍
工程自动驾驶车辆与机器人:蜻蜓模块化方法 刘少山 (中英对照电子书)
如果你对自动驾驶技术和机器人领域感兴趣,但又觉得市面上大多数相关书籍要么太过理论化、要么只讲述单一技术点,那么这本《工程自动驾驶车辆与机器人:DragonFly模块化方法》可能会给你带来一个全新的视角。作者刘少山是PerceptIn公司的创始人,这是一家专注于自动驾驶技术的公司,他从产业实践的角度出发,将自己多年的研发经验凝聚成这本书,试图回答一个核心问题:如何用模块化的思路来构建可靠且经济的自动驾驶系统。
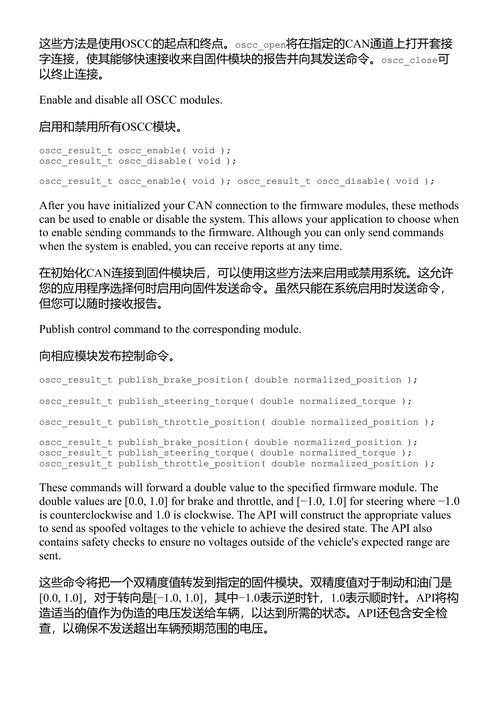
这本书的一个显著特点就是它的实用性。作者并没有从抽象的机器学习算法或复杂的数学公式开始讲起,而是直接从工程落地的角度出发,逐一拆解自动驾驶车辆和机器人的各个关键技术模块。从车内的通信系统讲起,作者详细介绍了CAN总线、FlexRay、CANopen等不同通信协议的特点和适用场景,这对于理解自动驾驶车辆的内部架构非常重要。随后他深入到线控底盘技术,包括电子油门、电子刹车、电子转向等关键技术,这些内容对于想要实际动手搭建自动驾驶平台的人来说非常实用。
在感知和定位方面,这本书涵盖了毫米波雷达、声呐、计算机视觉以及RTK GNSS等主流技术。作者不仅讲解了这些传感器的工作原理,更重要的是提供了实际部署和校准的指导。书中的第六章专门讲述计算机视觉系统的搭建,从硬件选型到校准再到具体的感知和定位应用,层层递进,很适合想要系统学习计算机视觉在自动驾驶中应用的读者。
规划与控制是自动驾驶的核心环节,作者在第七章中详细介绍了路径规划、行为规划、运动规划以及反馈控制等关键模块。特别值得一提的是,他结合了百度Apollo的迭代EM规划系统以及PerceptIn自己的规划控制框架,让读者能够看到不同公司在实际产品中是如何处理这些问题的。
这本书还有一个非常突出的亮点,就是它专门用了一整章的篇幅来讲如何构建DragonFly无人驾驶接驳车和公交车。从底盘硬件规格、传感器配置到软件架构、数据结构、用户界面,作者几乎是手把手地教读者如何从零开始搭建一个完整的自动驾驶系统。这种从理论到实践的完整闭环,在同类书籍中是比較少见的。
除了常见的自动驾驶技术,作者还将视野扩展到了更前沿的领域,比如太空探索机器人的自主性、边缘计算在自动驾驶中的应用、车联网(V2X)技术以及车辆安全等。这些内容反映了作者对行业趋势的判断,也让我们看到自动驾驶技术的发展远不止我们日常看到的无人车那么简单。
从整体结构来看,这本书的逻辑非常清晰,每个章节都遵循从基础概念到技术细节再到实际案例的顺序,很适合系统学习。作者在每个章节后都附上了参考文献,对于想要深入研究某个具体方向的读者来说也提供了很好的线索。
这本书特别适合几类读者:如果你是在校学生,学习的是车辆工程、自动化、计算机等相关专业,这本书可以帮助你建立一个完整的自动驾驶技术框架;如果你是在职工程师,想要转型到自动驾驶领域,这本书的实操性可以让你快速上手;如果你已经是从业者,想要了解模块化设计如何落地实施,这本书中关于DragonFly模块化方法的详细介绍也很有参考价值。
总的来说,这本2020年由Wiley-IEEE出版社出版的书,在自动驾驶领域的专业书籍中属于难得一见的工程导向型作品。它不追求讲得多深多广,而是聚焦于“如何把事情做出来”这个核心问题。对于想要从理论走向实践的人来说,这本书值得一读。