资源介绍
程)
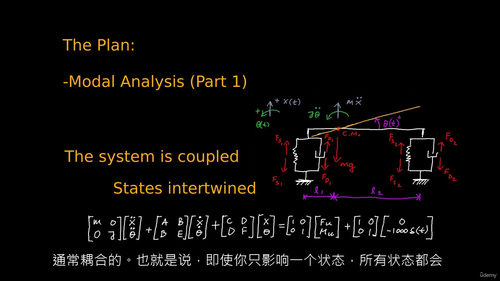
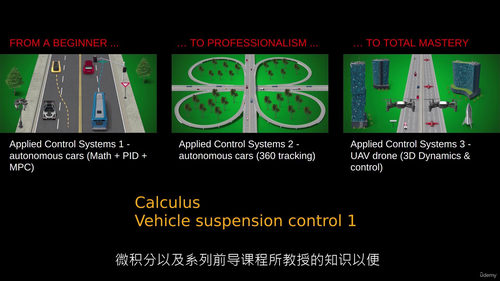
在车辆工程领域中,车辆悬架控制技术对于提升车辆的性能、安全性和舒适性起着关键作用。“车辆悬架控制 2 - 模态分析 + 极点配置” 这一课程,犹如一把钥匙,为学习者打开深入探索车辆悬架控制核心技术的大门。
本课程内容丰富,由 72 个视频精心组成,并且每个视频都配备了中文字幕 ,方便学习者理解复杂的专业知识,无论是对于车辆工程专业的学生,还是相关领域的工程师,都具有极高的学习价值。
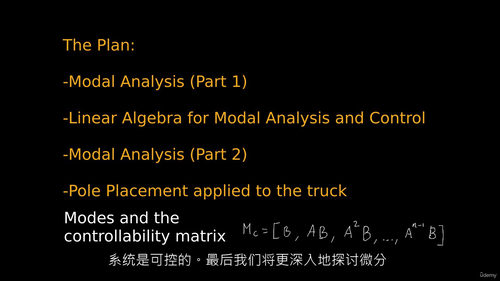
模块一:模态分析 Part 1 - 基础奠基
在这一模块中,学习者将从系统的基础知识入手,逐步深入了解模态分析的核心概念和方法。在 “1 - Introduction” 中,课程会为学习者搭建起对模态分析的初步认知框架,为后续的
模块二:必备背景 - 线性代数助力模态与控制
线性代数作为数学领域的重要分支,在本课程中发挥着举足轻重的作用,是深入理解模态分析和控制的核心数学工具。它为解决车辆悬架控制中的复杂问题提供了严谨的逻辑框架和强大的运算方法,使学习者能够将实际的物理系统转化为抽象的数学模型,并进行精确的分析和求解。
本模块精心安排了 36 个视频,内容涵盖了线性代数的多个关键知识点,从基础概念到高级应用,逐步深入。在 “10 - Invertible VS Invertible matrices” 中,学习者将开启对矩阵可逆性的探索之旅,明晰可逆矩阵在数学推导和实际应用中的关键作用。紧接着,“11 - Calculating the Eigenvalues” 和 “12 - Calculating the Eigenvectors Part 1” 聚焦于特征值与特征向量的计算。特征值和特征向量不仅是线性代数的核心概念,更是理解系统固有特性的关键,在模态分析中,它们能够揭示系统的自然频率和振动模式 。
随后,关于向量线性相关性的内容,如 “13 - Linearly Independent VS Linearly Dependent vectors formal definition” 以及相关示例视频,帮助学习者深入理解向量之间的线性关系,这对于判断系统的自由度和求解线性方程组至关重要。而在 “16 - Span and Basis Unique solution 2D” 等一系列关于向量空间的视频中,学习者将接触到向量空间的基与张成等概念,这些概念为理解系统的状态空间和运动方程提供了有力的支持。
此外,矩阵的对角化、正交性以及 Gram - Schmidth 过程等内容,也在本模块中得到了详细的讲解。这些知识不仅丰富了学习者的数学知识储备,更为后续深入学习模态分析和控制理论,如系统的解耦、状态空间的分析等,打下了坚实的理论基础 。
模块三:模态分析 Part 2 - 深入应用
如果说模块一是模态分析的理论基石,模块二是支撑起高楼的数学框架,那么模块三则是将理论付诸实践的关键环节,通过一系列实例分析,帮助学习者将模态分析知识运用到解决实际的车辆悬架控制问题中 。
在本模块的 16 个视频里,双质量弹簧系统和卡车模型成为了主角。在 “37 - Using Modal Analysis to Decouple a Double MassSpring System 1” 等一系列视频中,学习者将深入探索如何运用模态分析对双质量弹簧系统进行解耦。双质量弹簧系统是一个经典的动力学模型,它看似简单,却蕴含着丰富的动力学特性,是理解多自由度系统振动的基础。通过模态分析,学习者能够将耦合的双质量弹簧系统转化为独立的单自由度系统,从而更清晰地分析系统的振动特性,如固有频率、振型等。这不仅有助于深入理解系统的动态行为,还为后续的系统控制和优化提供了重要的理论依据 。
而在 “43 - Decoupling the truck using modal analysis 1” 等视频中,课程将视角转向更为复杂的卡车模型。卡车作为一个多自由度的复杂系统,在行驶过程中会受到各种力的作用,其悬架系统的性能直接影响到车辆的行驶稳定性、舒适性和安全性。通过模态分析对卡车悬架系统进行解耦和分析,学习者可以了解卡车在不同工况下的振动特性,找出系统的薄弱环节,并提出针对性的改进措施。例如,通过分析固有频率和振型,优化悬架系统的参数,避免共振现象的发生,从而提高卡车的行驶性能 。
此外,本模块还涉及到获取卡车的线性状态空间形式以及对解的分析,如 “48 - Obtaining the linear statespace form for the truck” 和 “49 - The analysis of the solutions 1” 等视频。状态空间形式是描述系统动态行为的一种重要方式,它将系统的输入、输出和状态变量有机地联系起来,为系统的控制和分析提供了有力的工具。通过学习如何获取卡车的线性状态空间形式,学习者能够运用现代控制理论对卡车悬架系统进行设计和优化,实现更好的控制效果 。对解的分析则有助于学习者深入理解系统的动态响应,评估系统的性能,为实际应用提供指导 。
模块四:极点配置应用 - 卡车可控性探索
在车辆悬架控制中,极点配置是一种重要的控制策略,它通过调整系统的极点位置,使系统具有更好的动态性能和稳定性。本模块紧密围绕极点配置在卡车上的实际应用展开,共包含 8 个视频,为学习者呈现了从理论基础到实际操作的完整知识体系 。
在 “53 - Intro to Pole Placement Control Law 1” 和 “54 - Intro to Pole Placement Control Law 2” 中,课程详细介绍了极点配置控制律的基本概念和原理。极点配置控制律是实现极点配置的核心算法,它通过设计合适的反馈增益矩阵,将系统的极点放置在期望的位置,从而达到改善系统性能的目的。学习者将深入理解极点配置控制律的数学推导和物理意义,为后续的学习和应用奠定坚实的理论基础 。
“55 - Computing the gain matrix example 1” 和 “57 - Computing the gain matrix example 2” 则通过具体的实例,演示了如何计算增益矩阵。增益矩阵的计算是极点配置中的关键步骤,它直接影响到系统的控制效果。通过这两个视频的学习,学习者将掌握计算增益矩阵的方法和技巧,学会根据系统的要求和性能指标,设计出合适的增益矩阵 。
此外,“56 - Introducing input reference” 引入了输入参考的概念。输入参考是系统期望的输入信号,它为系统的控制提供了目标和方向。通过引入输入参考,学习者可以更好地理解系统的控制目标和性能要求,从而更有效地设计控制器 。
在实际应用中,判断系统的可控性至关重要。“58 - Checking controllability with Modal Analysis” 和 “59 - Checking controllability with the controllability matrix” 分别介绍了如何通过模态分析和可控性矩阵来检查系统的可控性。模态分析可以从系统的固有特性出发,判断系统是否可控;而可控性矩阵则通过数学计算,直接判断系统的可控性。“60 - Checking if the systems are controllable examples” 通过具体的例子,帮助学习者进一步理解和掌握检查系统可控性的方法,学会在实际应用中判断系统是否可控,为系统的设计和优化提供依据 。
模块五:必备背景 - 多输入多输出系统微分方程
微分方程作为描述系统动态行为的重要数学工具,在多输入多输出(MIMO)系统中发挥着关键作用。本模块包含 8 个视频,旨在帮助学习者回顾微分方程的基础知识,并深入学习其在 MIMO 系统中的应用,为理解和分析复杂的控制系统奠定坚实的理论基础 。
在 “61 - Some quick revision” 中,课程对微分方程的基本概念和常见解法进行了快速回顾,帮助学习者巩固已有的知识,为后续学习做好铺垫。无论是一阶微分方程还是高阶微分方程,其求解方法和应用场景都在这个视频中得到了系统的梳理 。
“62 - Introducing the State Transition Matrix” 则引入了状态转移矩阵这一重要概念。状态转移矩阵是描述线性时不变系统状态随时间变化的关键工具,它能够将系统的初始状态与任意时刻的状态联系起来,揭示系统的动态特性。通过这个视频的学习,学习者将了解状态转移矩阵的定义、性质和物理意义,为后续分析系统的动态行为提供有力的支持 。
在 “63 - Solving an LTI statespace system using the state transition matrix” 中,课程详细讲解了如何利用状态转移矩阵求解线性时不变(LTI)状态空间系统。学习者将掌握求解的具体步骤和方法,学会运用状态转移矩阵来分析系统的响应和稳定性。这对于设计和优化控制系统具有重要的指导意义 。
“64 - Expressing the state transition matrix as a power series” 进一步深入探讨了状态转移矩阵的表示方法,将其表示为幂级数的形式。这种表示方法不仅有助于更深入地理解状态转移矩阵的本质,还为数值计算和系统分析提供了便利 。
“65 - Solving an LTI statespace system using modal analysis 1” 和 “66 - Solving an LTI statespace system using modal analysis 2” 则介绍了如何运用模态分析求解 LTI 状态空间系统。模态分析是一种将系统分解为多个模态的方法,每个模态对应系统的一个固有频率和振型。通过模态分析,学习者可以更清晰地了解系统的动态特性,从而更有效地设计控制器 。
最后,“67 - Obtaining the Transfer Function Matrix 1” 和 “68 - Obtaining the Transfer Function Matrix 2” 讲解了如何获取传递函数矩阵。传递函数矩阵是描述系统输入与输出关系的重要工具,它在频域中对系统进行分析,能够直观地反映系统的频率响应特性。学习者将掌握获取传递函数矩阵的方法和技巧,学会运用传递函数矩阵来分析系统的性能和稳定性 。
模块六:尾声 - 总结与拓展
课程的最后模块 “尾声 - 总结与拓展”,虽然视频数量不多,但却为整个课程画上了一个圆满的句号,同时也为学习者提供了进一步拓展学习的资源和方向 。