
资源介绍
文视频教程)
“车辆悬架控制进阶:PID、LQR 与共振分析” 是一门聚焦车辆悬架系统控制核心技术的专业课程,系统整合单输入单输出(SISO)与多输入多输出(MIMO)系统的共振分析、PID 控制参数整定、线性二次调节器(LQR)控制应用等关键内容,通过从简化模型到复杂模型的递进式教学,帮助学习者掌握车辆悬架控制的核心原理与工程实现方法。课程配套完善的中文学习资源,所有视频均配备中文字幕(srt 格式),同时提供 Python 代码文件等实践素材,兼顾理论深度与实操性,适合车辆工程、控制工程等相关领域的学生、工程师及技术爱好者深入学习。
二、课程核心架构与内容亮点
课程共设置 7 个模块,涵盖从基础理论到工程实践再到综合应用的完整知识体系,总计包含 47 个视频学习资源(通过统计 MP4 文件数量得出),各模块层层递进,构成逻辑严密的学习路径。
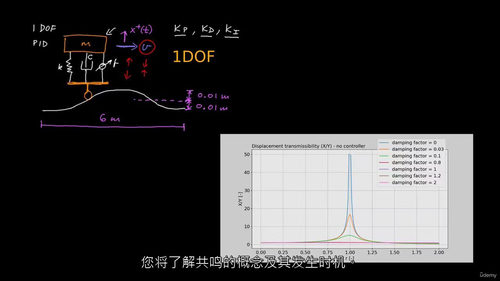
第一模块 “单输入单输出(SISO)系统共振分析” 作为课程基础,以简化四分之一车辆模型为载体,完成控制理论与车辆系统的首次结合。从课程导论切入,逐步讲解简化四分之一车辆模型的建立流程,通过数学建模将物理模型转化为可分析的控制模型,并引入阻尼比概念重构模型表达式,为后续分析奠定基础。模块核心在于从时域与频域两个维度展开共振分析:时域上通过解析求解常微分方程获得系统响应特性,频域上则将谐波函数转化为幅值 - 相移形式,建立振荡幅值与频率比的量化关系,最终结合 s 平面实现无阻尼固有频率的可视化表达,让学习者深刻理解共振现象的本质规律。
第二模块 “单自由度(1 DOF)模型 PID 闭环极点整定” 聚焦经典 PID 控制技术的深度应用。课程先从直观角度引入 PID 控制原理,结合闭环 PID 控制框图建立系统认知,再通过闭环传递函数的通用推导,逐步聚焦 PID 参数与闭环传递函数的关联表达式,创新性地提出基于闭环极点配置的 PID 参数整定方法,打破传统试凑法的局限性。为强化实操能力,模块专门设置 Python 语言实现的 PID 代码解析环节,并拓展至多输入多输出(MIMO)系统的 PID 控制应用,通过闭环传递函数矩阵构建与理论极点配置,解决复杂系统的控制问题,最后结合智能调参思路,讲解 6 个 PID 参数的高效整定技巧。
第三模块 “双自由度(2 DOF)四分之一车辆模型主导极点近似与 PID 整定” 实现模型复杂度的提升与控制方法的优化。课程先完善双自由度四分之一车辆模型的建立,推导运动方程并构建状态空间矩阵,明确该模型下 PID 控制面临的多变量耦合、参数整定难度大等核心挑战。针对这些问题,系统讲解主导极点近似法的原理与实现步骤,通过四阶段递进式教学,帮助学习者掌握从高阶系统中提取主导极点、构建低阶近似模型的方法,最终基于近似模型完成 PID 参数的精准整定,实现控制性能与计算效率的平衡。
第四模块 “线性二次调节器(LQR)在四分之一车辆模型中的应用” 引入现代控制理论的核心技术。课程通过 LQR 控制与传统极点配置控制的对比分析,凸显 LQR 在多目标优化控制中的优势,随后深入解析 LQR 控制的代价函数构成与权重矩阵设计方法,阐明如何通过权重参数设置体现对不同控制目标的偏好。为夯实理论基础,模块分三阶段详细推导黎卡提(Riccati)方程的由来与求解逻辑,揭示 LQR 控制的数学本质,并拓展讲解代价函数的修改方法,以适应不同变量的最小化控制需求。实操环节通过四分之一车辆模型的 LQR 控制代码解析,实现理论与实践的结合,最后通过 PID 与 LQR 控制的仿真结果对比,量化分析两种控制方法的性能差异,为工程应用中的方法选型提供依据。
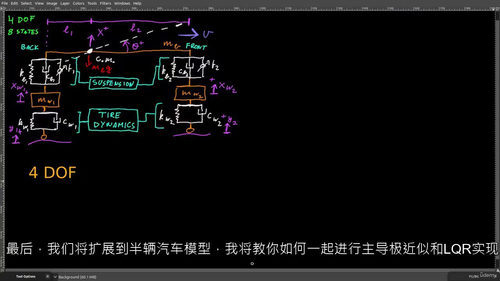
第五模块 “综合考核:半车辆模型建模、线性化与降阶” 作为课程的综合应用环节,聚焦半车辆模型这一更贴近实际的系统。模块先回顾前期核心知识点,明确考核要求,随后展开半车辆模型的完整建模流程,包括物理模型构建、运动方程推导,并重点讲解系统自然平衡点的计算方法,为后续线性化处理提供基础。线性化环节分两阶段进行,详细阐述非线性系统在平衡点附近线性化的数学原理与工程实现步骤,解决非线性系统难以直接控制的问题。针对线性化后的高阶系统,应用主导极点近似法进行降阶处理,通过四阶段专项教学,完成半车辆模型的降阶优化,全面考核学习者的综合建模与控制设计能力。
第六模块 “多输入多输出(MIMO)系统共振分析” 实现共振分析从 SISO 系统到 MIMO 系统的拓展。课程以半车辆模型为研究对象,讲解 MIMO 系统无阻尼固有频率的求解方法,建立固有频率与 s 平面极点幅值的对应关系,明确 MIMO 系统共振特性的分析思路。通过三个阶段的 Python 代码解析,逐步实现半车辆模型共振分析的编程实现,最后引入全车辆模型的概念,为后续深入学习埋下伏笔,构建从简化模型到全尺寸模型的完整知识体系。
第七模块 “课程总结与辅助资源” 为学习者提供全面的学习支持。模块包含 Windows 系统下 Python 环境的安装教程,确保学习者能够顺利搭建实操环境,同时提供课程所有核心案例的 Python 代码文件(如半车辆模型近似代码、双自由度 LQR 仿真代码、四自由度 LQR 仿真代码、单自由度 PID 仿真代码、阶跃响应分析代码等),以及补充讲义和拓展讲座等资源,帮助学习者巩固所学知识,拓展学习深度。
三、课程特色与学习价值
课程具有三大核心特色:一是递进式的模型体系,从单自由度四分之一车辆模型逐步拓展至半车辆模型,兼顾理论简化与工程实际;二是理论与实践的深度融合,每个控制方法均配套数学推导、代码实现与仿真验证,形成 “原理 - 实现 - 验证” 的完整学习闭环;三是中文资源的全面覆盖,所有视频均配备精准的中文字幕,代码与讲义均为中文注释,降低语言障碍,提升学习效率。
通过本课程的学习,学习者能够掌握车辆悬架系统从建模、分析到控制的全流程技术,具备 SISO 与 MIMO 系统共振分析能力、PID 与 LQR 控制的设计与实现能力,以及高阶系统降阶优化的工程技巧,同时熟练运用 Python 语言进行控制算法的编程与仿真,为车辆悬架控制领域的工程实践、科研创新提供坚实的知识与技能支撑。