资源介绍
机器人学:MATLAB运动学与动力学仿真(第三部分) (中文字幕英文视频教程)
在工业自动化、智能制造飞速发展的当下,机器人技术已成为核心支撑力量,而运动学与动力学仿真是机器人研发、调试与优化的关键环节。MATLAB作为功能强大的工程计算与仿真工具,为机器人相关的建模与仿真提供了高效可靠的实现路径。本次推出的《机器人学:MATLAB运动学与动力学仿真(第三部分)》课程,聚焦机器人核心技术的实践落地,通过系统的理论讲解与实操演示,帮助学习者掌握机器人运动学正解、逆解、动力学建模及轨迹规划的核心方法,提升基于MATLAB的仿真应用能力。
本课程内容体系完整,逻辑层次清晰,共分为四大核心模块,涵盖从基础建模到进阶应用的全流程知识,配套资源丰富且实用。课程包含68个核心教学视频(统计MP4文件得出),所有视频均配备中文字幕(SRT字幕文件),确保学习者能够精准理解课程内容,降低语言理解障碍。同时,课程同步提供大量配套学习资料,包括数学建模PDF文档、MATLAB脚本源文件(TXT格式)等,学习者可直接下载使用,实现理论学习与实操练习的无缝衔接。
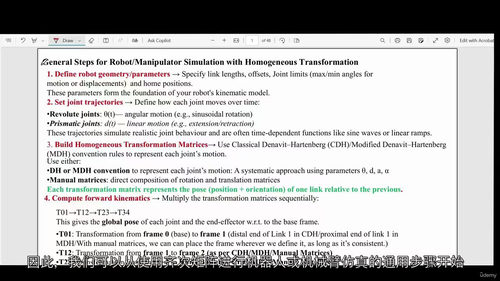
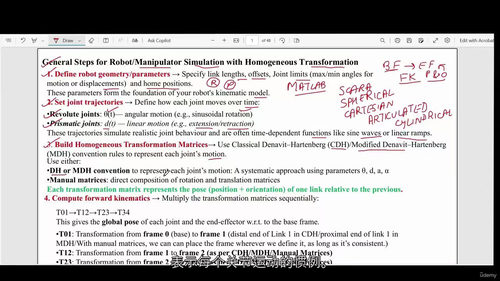
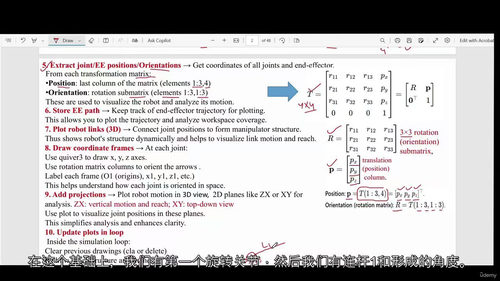
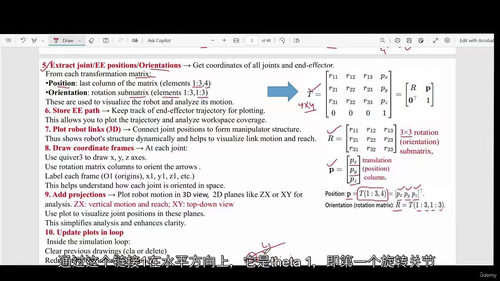
第一模块为“机械臂正运动学建模与MATLAB仿真”,是课程的基础核心内容。该模块首先讲解MATLAB机器人仿真的通用步骤,帮助学习者快速熟悉仿真环境与操作流程。随后重点深入Denavit-Hartenberg(DH)参数法这一机器人建模的核心工具,分别详细阐释经典DH(CDH) convention与改进DH(MDH) convention的原理与应用方法,并提供对应的PDF文档供学习者查阅复习。在此基础上,针对多种典型机械臂结构展开专项教学,包括SCARA机器人(RRPR构型)、RRR关节型机械臂、RRP、RPP、PPP等不同构型的机械臂。每个构型的教学均遵循“数学建模—MATLAB脚本编写—仿真实现”的逻辑展开,通过视频详细演示脚本编写过程与仿真操作步骤,配套的PDF建模文档与TXT脚本文件可让学习者直接复现仿真效果,深入理解不同构型机械臂正运动学的建模思路与仿真技巧。此外,模块还针对RRR平面机械臂提供了不同视角(3视角、45,30视角、0,90视角)的仿真演示,帮助学习者从多维度观察机械臂运动状态,强化对仿真结果的理解。
第二模块聚焦“机器人逆运动学:肘上与肘下构型MATLAB仿真”,直击机器人运动控制中的核心难点。逆运动学是实现机器人末端执行器精准定位的关键,而肘上与肘下构型是平面机械臂逆解中最典型的两种姿态。本模块首先通过数学建模PDF文档与视频讲解,系统阐释二连杆平面机器人肘上、肘下构型的逆运动学求解原理,让学习者掌握核心数学推导方法。随后通过视频详细演示对应的MATLAB脚本编写过程,包括逆解求解脚本与构型有效性验证脚本,并提供配套TXT脚本文件供学习者实操练习。模块还专门设置了仿真验证环节,通过视频展示肘上、肘下构型的仿真过程与有效性验证结果,帮助学习者直观判断求解结果的正确性。在此基础上,模块进一步拓展至三连杆(3R)平面机械臂的肘上、肘下构型逆运动学求解与仿真,实现知识的进阶应用。同时,针对RRP构型机械臂,模块分为A、B两个部分展开逆运动学可视化教学,逐步深入讲解复杂构型机械臂逆运动学的实现方法,提升学习者应对复杂问题的能力。
第三模块为“机器人动力学方程(欧拉-拉格朗日方法)MATLAB仿真”,深入机器人运动的本质规律。动力学分析是确定机器人运动所需驱动力/力矩的核心环节,欧拉-拉格朗日方法是机器人动力学建模的经典方法。本模块首先通过视频系统讲解基于欧拉-拉格朗日方法的机器人动力学方程原理,帮助学习者建立动力学建模的理论基础。随后以RRR关节型机械臂为切入点,通过视频演示扭矩计算的MATLAB脚本编写过程,提供配套TXT脚本文件,让学习者掌握动力学方程的工程实现方法。针对RRP构型机械臂,模块展开专项深入教学,不仅提供详细的数学建模PDF文档(含雅可比矩阵推导),还分场景讲解末端执行器垂直运动、水平运动两种情况下的动力学建模细节,并提供对应的MATLAB脚本文件与仿真演示视频。此外,模块还专门讲解RRP机械臂扭矩随时间变化的MATLAB脚本编写与仿真结果分析,帮助学习者理解机器人运动过程中扭矩的动态变化规律,为机器人控制系统设计提供关键支撑。
第四模块围绕“机器人不同轨迹规划曲线”展开,聚焦机器人运动的平滑性与精准性优化。轨迹规划是机器人运动控制的重要环节,直接影响机器人运动的稳定性与作业精度。本模块首先通过PDF文档与视频讲解,系统介绍机器人末端执行器运动常用的多种轨迹类型,分析不同轨迹的特点与适用场景,帮助学习者建立轨迹规划的系统认知。随后通过视频详细演示不同轨迹规划的MATLAB脚本编写过程,提供配套TXT脚本文件,让学习者掌握轨迹规划的工程实现方法。最后通过仿真演示视频,直观展示不同轨迹下机器人的运动状态,帮助学习者对比分析不同轨迹规划方案的优劣,提升轨迹优化设计能力。
本课程具有极强的实用性与针对性,核心优势在于理论与实操的深度融合。所有教学内容均围绕MATLAB仿真展开,每个知识点都配备对应的视频演示、数学建模文档与脚本文件,学习者可边学边练,快速将理论知识转化为实操能力。课程覆盖的机械臂构型丰富,从简单的二连杆、三连杆平面机械臂到复杂的SCARA、RRP、RPP等构型,从正运动学到逆运动学,从动力学建模到轨迹规划,形成了完整的知识体系,能够满足不同层次学习者的需求。无论是机器人相关专业的学生、从事机器人研发的工程师,还是对机器人技术感兴趣的爱好者,都能通过本课程系统提升机器人建模与仿真能力。
课程的中文字幕设计确保了知识传递的精准性,配套的海量脚本文件与建模文档为学习者提供了充足的实践素材,帮助学习者快速上手操作,规避实操过程中的常见问题。通过本课程的学习,学习者将熟练掌握基于MATLAB的机器人运动学与动力学仿真核心技术,能够独立完成多种构型机械臂的建模、仿真与轨迹规划任务,为后续从事机器人相关的研发、调试与优化工作奠定坚实的技术基础。