资源介绍
视频数量:70个
总时长:4小时17分
课程介绍:
机器人导航深度实战:定位、地图构建与自主导航完全指南
想象一下,你有一台小机器人,你告诉它“去厨房”,它就能自己穿过客厅、绕过茶几、准确抵达厨房。这听起来像是科幻电影,但这就是ROS机器人导航系统每天在做的事情。而这正是你即将掌握的核心技能。
这门课程是ROS入门系列的进阶篇,专门解决一个让无数学习者头疼的问题:机器人是怎么知道自己在哪里的?它是怎么规划路径的?地图是怎么生成的?这些看似复杂的问题,课程会用循序渐进的方式帮你彻底搞明白。
课程使用的核心工具是Turtlebot3模拟器,这是一个专门为ROS学习者设计的仿真平台。你不需要购买实体机器人,在电脑上就能模拟真实的机器人导航场景。从第一节课开始,你就能看到机器人如何在仿真环境中完成导航任务,这种直观的体验会让你对后续的理论学习充满期待。
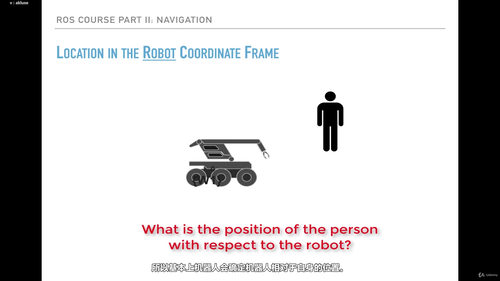
课程首先带你进入二维世界的定位问题。你会学到机器人的位姿是什么意思,坐标系之间的变换是怎么计算的。课程用通俗的方式讲解二维平移和旋转,然后引出变换矩阵这个核心概念。不要被数学吓到,课程会用具体的例子手把手教你,比如告诉你“当机器人从A点移动到B点时,这些坐标是怎么变化的”。
掌握了二维变换后,课程自然过渡到三维空间。三维坐标系遵循右手定则,这在机器人学里非常重要。课程会详细演示三维空间中的变换是如何工作的,让你理解为什么真实的机器人需要考虑三个维度的运动。这部分内容为后续学习TF包打下坚实的基础。
接下来的重头戏是三维空间中的朝向表示。你会接触到多种表示方法:三角度表示法、任意向量表示法,以及在ROS中广泛使用的四元数。四元数听起来很高深,但课程会用形象的比喻帮你理解它的优势——它能避免万向锁问题,让机器人旋转计算更加稳定。课程还会教你如何在四元数和欧拉角之间自由转换,这在实际编程中非常实用。
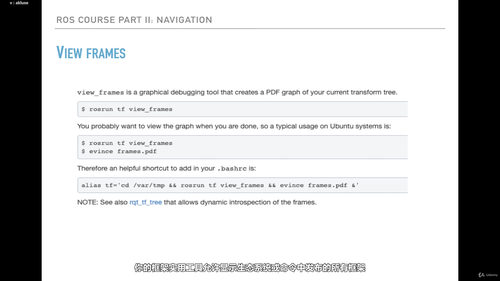
理解了数学基础后,课程带你深入ROS中最重要的功能包之一——TF包。这个包负责管理和追踪所有坐标系之间的关系。你可以把它想象成机器人的“空间感知系统”,它让机器人知道传感器看到的东西相对于机器人本体的位置,以及机器人相对于世界的位置。课程会用大量实例教你如何创建TF广播器和监听器,如何在ROS节点中发布和接收坐标变换。URDF语言也会在这里介绍,它用来描述机器人的模型和各个部件之间的空间关系。
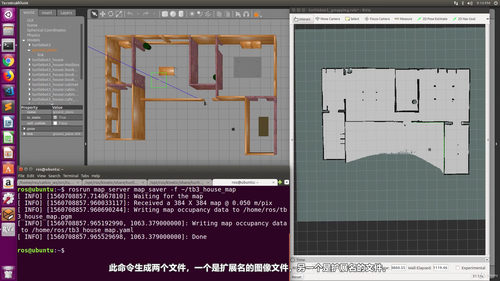
从第七部分开始,课程进入真正的导航实战。你会看到SLAM(同步定位与地图构建)是如何工作的。通过Turtlebot3仿真器,课程演示了机器人如何边移动边绘制环境地图。课程会详细讲解ROS中地图的数据结构,以及SLAM相关的节点和启动文件是如何配置的。基于已有地图的导航流程也会完整呈现,包括机器人如何根据地图定位自己,如何规划从起点到目标点的路径。
课程特别关注导航栈的恢复行为。当机器人遇到障碍物或者卡住时,它会尝试什么策略来自救?这些恢复机制是如何工作的?课程会一一解析。同时你还会学到如何编写自己的导航节点,让机器人完成自定义的导航任务。
导航系统不是配置好就能完美工作的,参数调优是必备技能。课程专门用一个章节讲解如何调整导航栈的各项参数。你会学到如何设置机器人的最大最小速度和加速度,如何调节全局规划器和局部路径规划器。动态窗口法(DWA)是局部规划的核心算法,课程会深入讲解它的原理、仿真时间参数的意义,以及轨迹评分的机制。掌握这些内容后,你就能根据自己机器人的特性优化导航性能。
最后一个主题是响应式导航。这种方法不依赖预先构建的地图,而是让机器人根据实时感知做出决策。课程介绍了跟随者应用的设计思路,以及经典的Bug算法家族——BUG0、BUG1和BUG2。这些算法虽然简单,但在某些场景下非常实用。
整个课程的核心理念是理论与实践并重。每介绍一个理论概念,课程都会配合仿真演示让你看到它的实际效果;每展示一个实践操作,课程都会解释背后的原理。这种安排特别适合那些看了很多教程却还是云里雾里的学习者。
学完这门课程后,你将能够独立完成机器人导航系统的搭建和调试。你会清楚TF包在ROS导航中扮演的角色,理解各种坐标变换的数学原理,掌握SLAM和地图导航的实现方法,并且具备调优导航参数解决实际问题的能力。这些技能对于从事机器人开发、参与ROS项目开发或者进行机器人研究工作都非常关键。
课程使用的是ROS Noetic版本,配合Turtlebot3仿真器和预配置的虚拟机环境,省去了繁琐的安装配置过程,让你能够专注于核心内容的学习。