资源介绍
视频数量:11个
总时长:2小时46分
课程介绍:
用MATLAB和Simulink搭建特斯拉电动车模型与PID速度控制器
你有没有想过,特斯拉Model S凭什么能在3秒多内从零加速到百公里?那些令人惊叹的性能数据背后,到底藏着怎样的数学原理?如果你对这些问题感兴趣,又想动手用MATLAB和Simulink把整个过程模拟出来,那这门课正好适合你。
整门课围绕一个核心项目展开:基于特斯拉Model S P85建立电动车的数学模型,然后在Simulink里搭建完整的仿真环境,最后设计一个PID速度控制器来控制车速。项目式的学习方式让你不只是被动看视频,而是跟着老师的思路一步一步把模型搭建起来,理解每一个公式背后的物理意义。
课程分为两大块内容。
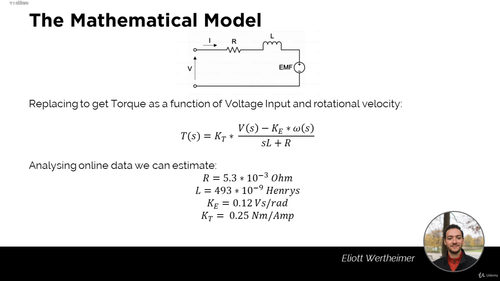
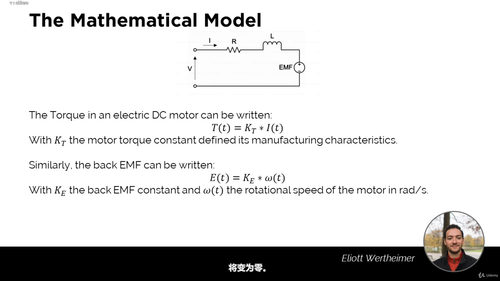
第一部分是数学建模。开头会先介绍整个项目的设计目标,涉及到Model S P85的几个关键参数:车重2108公斤、460马力功率输出、600牛米的峰值扭矩、0.24的风阻系数。搞清楚这些数据后,你才能理解为什么这辆车能有那样的性能表现。接着分析电池性能,看看346伏特的电池组怎么给电机供电。然后进入电机建模环节,建立等效直流电机的传递函数,这部分是理解整个控制系统的基础。最后要分析汽车行驶过程中的各种作用力,包括驱动力、滚动阻力和空气阻力,建立完整的汽车动态特性方程。
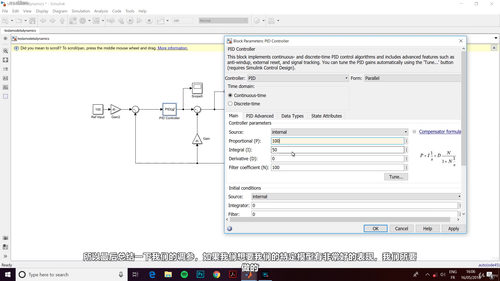
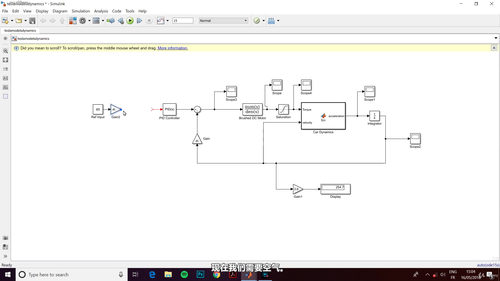
第二部分进入Simulink实操。先是做模型的基础设置,把前面推导出的电机传递函数用Simulink模块实现出来。然后搭建完整的汽车动力学开环模型,把电池、电机、车身这些环节串起来。开环模型搭好后需要进行测试,看看在没有控制器的情况下,系统对输入信号会有什么样的响应。测试结果符合预期后,就开始实现PID控制器,设计闭环控制系统来实现速度控制。最后两个课时专门讲调参:调整PID控制器的比例增益和积分增益,观察这些参数变化对系统输出有什么影响;还要处理输出饱和的问题,确保仿真结果符合真实物理约束;最后做深入的稳态误差分析,理解微分增益的作用。
整个课程将近三个小时,内容紧凑但不赶进度,每一个重要概念都配有对应的Simulink演示。你会看到老师怎么从零开始搭建模型,怎么设置模块参数,怎么分析仿真结果,这种工程实践的思维比看理论书要直接得多。课程提供了配套的PDF讲义,重要的公式和推导过程都整理好了,方便复习。
这门课适合有一定理工科基础的人学习。如果你正在学习控制系统或者MATLAB,想找个完整的项目练练手,这门课能把PID控制、传递函数、闭环系统这些概念串起来理解。如果你对电动车技术感兴趣,想搞清楚电机的动态特性怎么用数学语言描述,这门课的建模部分会给你清晰的答案。如果你是工科学生或者刚入行的工程师,需要掌握Simulink建模技能,这个项目涉及的内容在机器人、无人机、工业自动化领域都很常见,学完以后可以迁移到其他控制系统上。
学完这门课,你将掌握从物理建模到控制器设计的完整流程,能够用Simulink搭建简单的控制系统并进行分析调参。这些能力不管是继续学习更复杂的控制算法,还是转向其他工程仿真领域,都是扎实的基本功。