资源介绍
视频数量:16个
总时长:2小时8分
课程介绍:
PID控制器:控制设计入门
想象一下这个场景:每天早上,你走进电梯,按下楼层按钮,电梯平稳地启动、加速、减速,最后精准地停在你要去的楼层。整个过程行云流水,你甚至不会多看一眼。但你有没有想过,电梯是怎么知道该什么时候加速、什么时候减速、该用多大的力度的?
答案就是控制系统。而PID控制器,正是控制系统中最经典、最实用、应用最广泛的核心技术。
这门课程将带你从零开始,一步步揭开控制系统设计的神秘面纱。你会学到控制系统的基本原理,了解为什么简单粗暴的控制方式行不通,掌握比例、积分、微分三种控制方法的精髓,最终能够独立设计出稳定可靠的控制算法。整个课程只有两个多小时,内容紧凑但不仓促,每个知识点都配有实际的模拟器演示和编程练习。
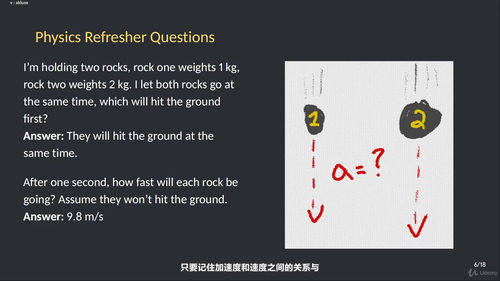
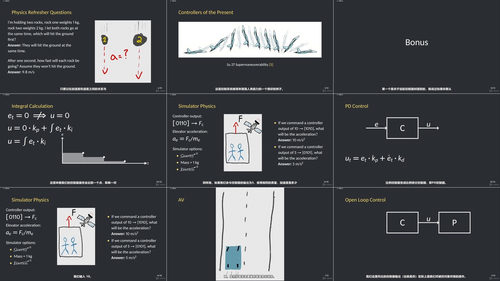
课程首先从物理原理讲起。在设计控制器之前,你必须理解被控对象是怎么工作的。电梯为什么会移动?是什么力量在驱动它?当控制器发出指令时,电梯的实际运动状态会如何响应?这些问题看似基础,却直接决定了后续控制器设计的成败。
接下来,课程安排了一个设计第一个控制器的实战环节。这不是简单的理论讲解,而是让你亲手尝试、发现问题、然后在挫折中领悟真谛。你会先尝试用最直观的逻辑控制来驱动电梯——给个指令,电梯就动。这个方案很快就会暴露出问题:电梯要么冲过目标位置,要么在到达之前就停下来,根本做不到精准停靠。然后你会尝试模糊逻辑控制,通过设定一系列条件规则来调整输出。听起来应该更智能对吧?但实际效果同样不理想。通过这两个失败的尝试,你会深刻理解到一个关键事实:控制器的输出作用的是加速度,而不是直接控制速度。当你踩下汽车油门,车子会加速,但松开油门后车子不会立刻停下,而是会凭借惯性继续滑行。电梯也是一样的道理,它需要一个先减速再停靠的过程,而之前设计的控制器完全忽略了这个物理特性。这个环节的意义在于,它让你真正理解了控制对象与控制器之间的关系,而不是死记硬背公式。
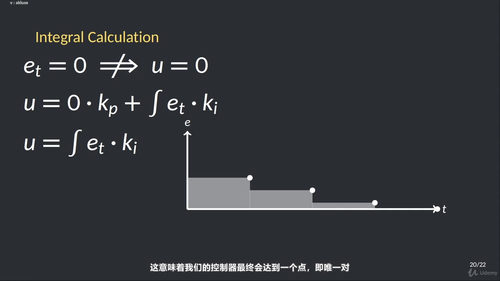
在完成这些铺垫之后,课程正式进入PID三种控制方法的学习。比例控制是最基础的控制策略,根据当前误差的大小来调整输出。误差越大,控制作用越强。这听起来很合理,但单独使用比例控制往往无法消除稳态误差——系统最终会稳定在一个有偏差的状态。微分控制则关注误差的变化趋势,当系统正在快速接近目标时提前减小控制量,起到阻尼和预测的作用,防止过冲和振荡。最后的积分控制则负责消除那些比例和微分都无法处理的稳态误差,通过对历史误差的累积来调整控制输出。
这三种控制方法单独使用各有局限,但组合在一起就成了功能强大的PID控制器。课程中,你不仅会学到每种控制的原理和适用场景,还会有专门的编程作业来巩固理解。模拟器会实时显示你的控制效果,误差曲线、超调量、调节时间,这些指标一目了然。
整个学习过程中,你不需要担心编程基础的问题。课程提供了详细的Python安装指南和Conda环境配置教程,即使你是第一次接触Python,也能顺利完成环境搭建。所有的控制器设计和仿真都会在Python环境中完成,这既保证了学习的便利性,也为以后进一步深入自动化控制领域打下了基础。
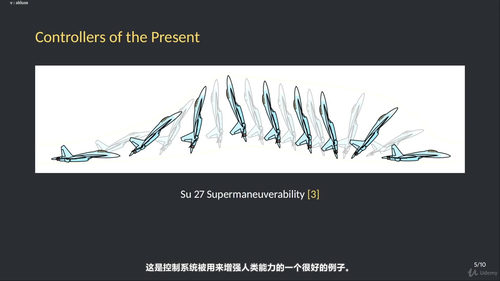
学完这门课程之后,你将具备独立分析和设计简单控制系统的基础能力。不再只是调参数凑效果,而是真正理解背后的物理原理和控制逻辑。PID控制器虽然名字听起来专业,但它实际上应用在我们生活的方方面面——空调的温度调节、汽车的巡航控制、无人机的姿态稳定、工业设备的精确运动,这些都是PID控制的用武之地。掌握了这门技术,你就拥有了解释和改进这些系统的钥匙。